![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 41 (Nº 10) Año 2020. Pág. 4
GOMEZ-ROJAS, Jorge 1; LINERO-RAMOS, Rafael 2 & BELTRAN-GOMEZ, Yesica 3
Recibido: 30/08/2019 • Aprobado: 13/03/2020 • Publicado 26/03/2020
RESUMEN: Este artículo presenta el diseño de un sistema que estima la posición en coordenadas polares y la velocidad de desplazamiento cartesiana de un vehículo aéreo no tripulado. Se implementa este estimador con la simulación de señales en Matlab utilizando un Filtro Kalman Extendido (EKF). Se obtiene un error cuadrático máximo del orden de 10^(-4) para la posición y 10^(-5) para la velocidad, concluyendo que el filtro EKF permitió la estimación con un alto grado de precisión en la posición aún cuando el dispositivo GPS entrega medidas contaminadas con ruido blanco. |
ABSTRACT: This article presents the design of a system that estimates the position in polar coordinates and the cartesian travel speed of an unmanned aerial vehicle. This estimator is implemented with the simulation of signals in Matlab using an Extended Kalman Filter. A maximum square error of the order of 10^(-4) for the position and 10^(-5) for the speed is obtained, concluding that the EKF filter allowed the estimation of the position even when the GPS device delivers measurements contaminated with white noise. |

Los vehículos aéreos no tripulados permiten el desarrollo de diversas actividades en distintos campos, tales como: agricultura, seguridad y defensa, medio ambiente, entre otros. En los últimos años, su uso se ha impulsado, debido al éxito que ha tenido en aplicaciones militares, a raíz de esto diferentes grupos de investigación y empresas se han dedicado a realizar estudios de estos sistemas (Mejías Alvarez, 2006).
El principal problema que se presenta con los vehículos aéreos no tripulados es que, al no tener control humano, se debe hacer un seguimiento para detectar la ubicación del mismo y realizar el control adecuado del vehículo, debido a esto, es necesario tener sistemas de seguimiento que presenten la información con el error más bajo posible, para obtener los datos con una precisión alta (Jaramillo Gómez y Gómez Yepes, 2013).
El filtro Kalman es un algoritmo que permite identificar el estado oculto no medible de un sistema dinámico lineal, siendo capaz de seleccionar la señal adecuadamente conociendo previamente la varianza del ruido que contamina el sistema (Mejías Alvarez, 2006). Al ser un algoritmo recursivo funciona en tiempo real utilizando las mediciones de entrada actuales, el estado calculado previamente y la matriz de incertidumbre (Young y Chellappa, 1990).
Eduardo Giraldo, Pablo Muñoz y Jhon Bonilla en la Universidad Tecnológica de Pereira y Universidad del Quindío desarrollaron un modelo dinámico de un vehículo aéreo no tripulado tipo QuadCopter, aplicando un controlador que utiliza la realimentación de estados para llevar el sistema a un estado estable en 100 ms (Gutiérrez, Suárez, y Becerra, 2016). El algoritmo tiene un filtro de mínimos cuadrados con identificación MIMO, lo que permite obtener un error medio cuadrático de 0.2562 grados en una simulación de 50s; utilizando un controlador LQR se logra controlar e identificar el sistema inicial en un tiempo de 3.7s y lo puede ser comparable con un controlador PID convencional lo que permite reducir el tiempo de establecimiento y mejorar el seguimiento de referencia en el controlador LQR (Gutiérrez, Suárez, y Becerra, 2016).
Lu Dai y Guang Jin desarrollaron un simulador para el control de posición en 3 ejes de naves espaciales. El sistema de consiste en tres volantes de reacción y cuatro giroscopios de control de momento (CMG). Diseñaron un filtro Kalman extendido para proporcionar la posición para el controlador. Los resultados que obtuvieron les permitió demostrar que el sistema de determinación de posición puede alcanzar un alto nivel de precisión (Dai y Jin, 2010).
Federico von Bergen, Juan Giribet y P. Martos desarrollaron un sistema de navegación de posición de bajo costo para naves espaciales. El sistema fusiona mediciones de un giroscopio MEMS de tres ejes y una cámara CCD que identifica un patrón conocido de puntos (que emulan las estrellas). El sistema fue implementado en un procesador ARM Cortex-A8, ejecutándose en el sistema operativo GNU / Linux y fue probado en un banco de pruebas de aire como validación experimental (Von Bergen, Giribet, y Martos, 2015).
Jaw-Kuen Shiaul, Wei-Van Luol y Long-Kuang Lee realizaron el diseño y la implementación de un sensor para detectar la colisión electrónica de un vehículo aéreo. La función principal del sensor de colisión es monitorear continuamente la situación de vuelo del vehículo aéreo, y activa el sistema ELT en el caso de accidente o choque. El componente principal del sensor son los acelerómetros MEMS. La adquisición de datos y la determinación de colisión se logran utilizando un microcontrolador PIC de bajo costo. La condición de falla se determina en función de la aceleración del vehículo y la variación de velocidad (Shiau, Luo, y Lee, 2008).
Xiemi y Daquing (Xu y Huang, 2018) proponen un algoritmo RANSAN basado en información previa para implementar la estimación de la posición de un vehículo aéreo no tripulado UAV. Este método utiliza en primer lugar el algoritmo SURF para procesar las imágenes de secuencia adquiridas por el UAV en diferentes ángulos de la misma área objetivo en el vuelo real, para lograr la extracción y la coincidencia de puntos característicos entre las imágenes. Con la asistencia de la información de la posición proporcionada por los sistemas GPS e IMU, el algoritmo RANSAC combinado con el algoritmo de cinco puntos se utiliza para obtener la información de posición correspondiente del UAV en cualquier momento.
Teniendo en cuenta que la precisión y disponibilidad de la posición de los vehículos aéreos no tripulados son componentes importantes en el éxito de la misión y la seguridad de la aviación, en Ucrania se desarrolló un sistema que utiliza un conjunto de dispositivos sensores de bolsillo personal para la medición directa y el procesamiento remoto de datos para el posicionamiento y navegación del UAV (Protsenko, Rudenko, y Ostroumov, 2019). Debido a los sensores disponibles en el mercado el precio del sistema se reduce además de hacer posible procesar los datos de forma remota e independiente.
Zakharin y Ponomarenko (Zakharin y Ponomarenko, 2017) proponen un esquema de construcción de un complejo de navegación integrado de un vehículo aéreo no tripulado, con dos subsistemas: inercial y de rumbo aéreo. Para cada subsistema, se implementan algoritmos para el procesamiento complejo de la información de navegación desde los sensores de navegación correspondientes y el equipo a bordo del GPS sobre la base de un circuito de compensación no invariante. La principal característica es que el vehículo aéreo no tripulado complejo de navegación adaptativo mejorará la precisión de la determinación de los parámetros de navegación del vuelo, la confiabilidad y la inmunidad al ruido de la aeronave durante la tarea de vuelo.
El sistema desarrollado presenta un aporte importante debido a que el error cuadrático se minimiza y la precisión de la posición y velocidad del vehículo es alta. A continuación, se detalla la metodología utilizada en el desarrollo del sistema, los resultados y las conclusiones obtenidas con el desarrollo del sistema.
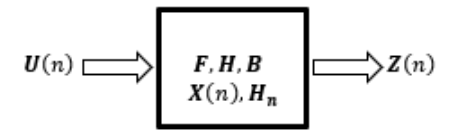
Se realiza el diseño de un sistema que estima la posición y la velocidad de un vehículo aéreo en 3 ejes, este sistema es diseñado mediante un Filtro Kalman Extendido (EKF, Extended Kalman Filter) teniendo en cuenta las etapas de predicción, medición y actualización. La posición original del vehículo se conoce con gran exactitud y se supone que su partida es desde la posición de reposo. El objetivo del sistema es estimar de la manera más precisa la posición en coordenadas polares y la velocidad de desplazamiento cartesiana del vehículo en todo momento, a partir de las mediciones del acelerómetro y el GPS.
La formulación del Filtro Kalman tiene dos características principales: utiliza un modelo dinámico o de espacio de estados y el procesamiento recursivo de los datos de entrada (Proakis y Manolakis, 2007).
El Filtro Kalman minimiza la varianza estimada del error, además halla la innovación con la diferencia entre las mediciones y el estimador a priori (Semenov, Chernokulsky, Razmochaeva, y Svertoka, 2018).
El Filtro Kalman Extendido se utiliza cuando se tienen funciones vectoriales no lineales, usando una aproximación de la serie de Taylor, se puede transformar un sistema no lineal a un sistema lineal respecto a la estimación actual.
Se muestra a continuación en la Fig. 1 el sistema dinámico planteado para el desarrollo de este proyecto.
Fig. 1
Sistema dinámico del funcionamiento del EKF.


Para efectos de simulación se asume una varianza de ruido de estado (sw) y una varianza de ruido de medición (sv) con valores de 0.001. En cuanto al diferencial de tiempo para estimar la posición del vehículo se considera en 0.1 segundos y una longitud de las señales equivalentes a 1000 muestras. De igual manera, se toma un vector de señales de entrada conformado por aceleraciones aleatorias filtradas por un filtro normalizado pasa bajo elíptico con frecuencia de corte 0.1.
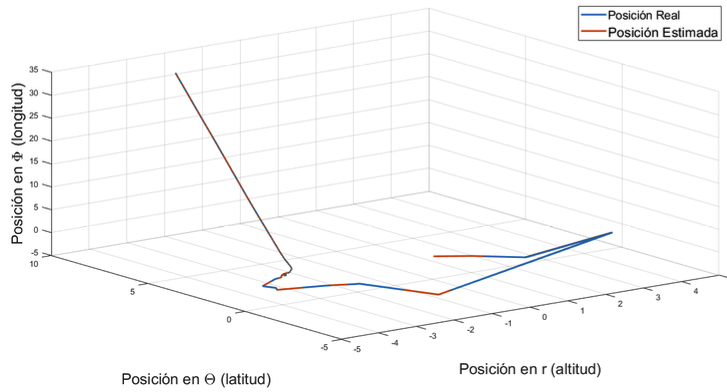
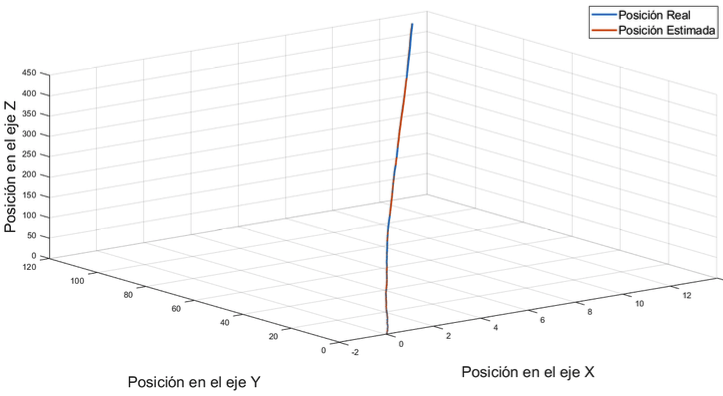
A continuación, se muestran los resultados obtenidos para la estimación de la posición en coordenadas polares y cartesianas en las Fig. 2 y Fig. 3.
Fig. 2
Señal de posición real (azul) vs. Señal de posición
estimada en coordenadas polares (rojo).

-----
Fig. 3
Señal de posición real (azul) vs. Señal de posición
estimada en coordenadas cartesianas (rojo).

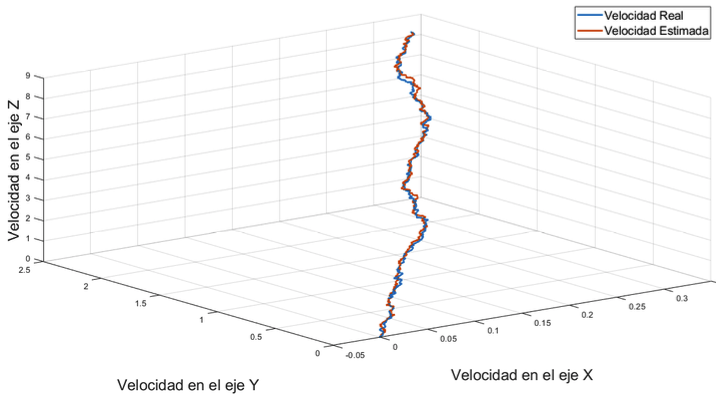
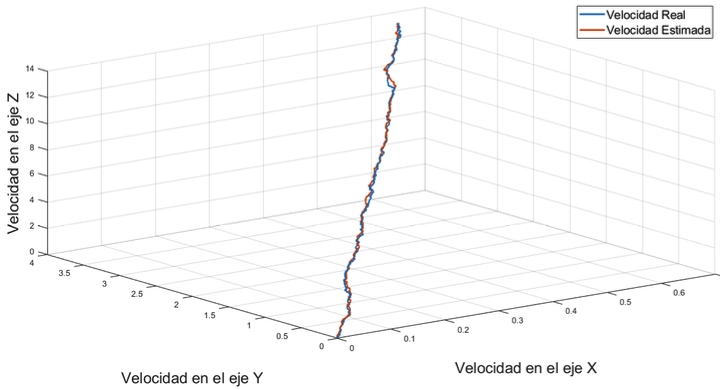
En la Fig. 4 se muestran los resultados obtenidos para la estimación de la velocidad en coordenadas cartesianas.
Para efectos de visualización gráfica también se simuló el sistema de estimación con un vector de señales de entrada conformado por aceleraciones constantes observando que la velocidad incrementó constantemente en los 3 ejes (X Y Z). Estos resultados se pueden ver en las Fig. 5 a Fig. 7.
En las gráficas mostradas a continuación se puede observar que la posición y velocidad estimadas siguen muy bien a la posición y velocidad reales del sistema.
Fig. 4
Señal de velocidad real (azul) vs. Señal de velocidad
estimada en coordenadas cartesianas (rojo).
-----
Fig. 5
Señal de posición real (azul) vs. Señal de posición estimada
en coordenadas polares (rojo) para una aceleración constante.
-----
Fig. 6
Señal de posición real (azul) vs. Señal de posición estimada en
coordenadas cartesianas (rojo) para una aceleración constante.
-----
Fig. 7
Señal de velocidad real (azul) vs. Señal de velocidad estimada
en coordenadas cartesianas (rojo) para una aceleración constante.
-----
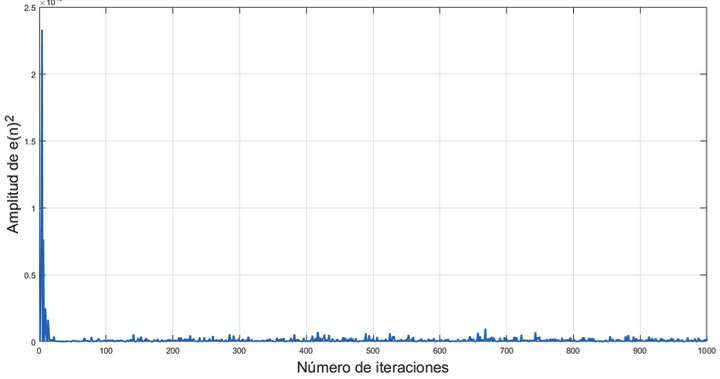
A continuación, se evalúa la confiabilidad del filtro implementado a través de una medición del error cuadrático medio, lo cual se puede observar en las Fig. 8-13.
Se considera que el sistema implementado en Matlab realiza una estimación precisa de la posición en coordenadas polares y la velocidad de desplazamiento cartesiana del vehículo aéreo en todo momento, debido a que el error cuadrático máximo al momento de estimar la posición en altitud (r) es de 2x10^(-4) y en promedio el error tiende a 0. El error cuadrático máximo al momento de estimar la posición en latitud (θ) es de 2.3x10^(-4) y en promedio el error tiende a 0. El error cuadrático máximo al momento de estimar la posición en longitud (φ) es de 1.1x10^(-4) y en promedio el error tiende a 0.
Fig. 8
Error cuadrático medio de la estimación
de posición en r (altitud).

-----
Fig. 9
Error cuadrático medio de la estimación
de posición en (latitud).
-----
Fig. 10
Error cuadrático medio de la estimación
de posición en (longitud).

-----
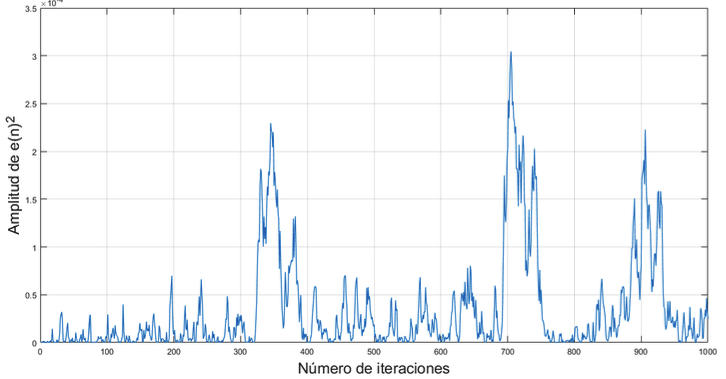
Además, el error cuadrático en promedio al momento de estimar la velocidad en el eje X fue de 1x10^(-5) el error cuadrático en promedio al momento de estimar la velocidad en el eje Y fue de 3.13x10^(-5) el error cuadrático en promedio al momento de estimar la velocidad en el eje Z fue de 3.44x10^(-5)
Fig. 11
Error cuadrático medio de la
estimación de velocidad en X.

-----
Fig. 12
Error cuadrático medio de la
estimación de velocidad en Y.
-----
Fig. 13
Error cuadrático medio de la
estimación de velocidad en Z.

-----
A través de la implementación de un Filtro Kalman Extendido, fue posible la estimación de la posición en coordenadas polares y la velocidad de desplazamiento cartesiano de un vehículo aéreo acelerado por un piloto remoto, de manera precisa, obteniendo errores cuadráticos medios en el orden de .
El Filtro Kalman Extendido funciona de manera adecuada permitiendo la linealización de las funciones vectoriales no lineales mediante el uso del jacobiano, además permite la estimación de la posición aun cuando el dispositivo GPS entrega medidas contaminadas con ruido blanco.
Los resultados de la simulación utilizando Matlab muestran la precisión de los datos que se obtienen con el EKF, y muestran un buen rendimiento para el seguimiento del vuelo de un vehículo aéreo no tripulado.
Al analizar la simulación de los experimentos, la convergencia del EKF y la complejidad de su operación que demuestran que el EKF tiene un buen rendimiento integral en términos de velocidad y precisión.
Dai, L., y Jin, G. (2010). A 3-axis simulator for spacecraft attitude control research. Information and Automation (ICIA), 2010 IEEE International Conference on, 1040–1044. https://doi.org/10.1109/ICINFA.2010.5512158
Gutiérrez, P. A. M., Suárez, E. G., y Becerra, J. A. B. (2016). Identificación y control de un Vehículo Aéreo no Tripulado tipo Quadcopter. Ingenierías USBmed, 7(1), 5–10. https://doi.org/http://dx.doi.org/10.21500/20275846.1801
Jaramillo Gómez, F., y Gómez Yepes, A. (2013). Sistema de Control para la Estabilidad y Orientación de un Helicóptero Quadrotor. 1–122.
Mejías Alvarez, L. O. (2006). Control visual. Recuperado de http://oa.upm.es/366/1/thesis-LuisMejias.pdf.
Proakis, J., y Manolakis, D. (2007). Tratamiento Digital de señales. En Universitat de Valencia (4a ed., Vol. 53). https://doi.org/10.1017/CBO9781107415324.004.
Protsenko, E., Rudenko, M., y Ostroumov, I. (2019). Unmanned Aerial Vehicle Positioning by Data from Pocket Device Sensors. 2019 IEEE 5th International Conference Actual Problems of Unmanned Aerial Vehicles Developments, APUAVD 2019 - Proceedings, 161–164. https://doi.org/10.1109/APUAVD47061.2019.8943882
Semenov, V. P., Chernokulsky, V. V, Razmochaeva, N. V, y Svertoka, Y. S. (2018). Investigation of the Kalman Filter in Problems of Increasing the Accuracy of Measurements Using MEMS ( 9 axis ) Motion Sensors. 1150–1153.
Shiau, J. K., Luo, W. V., y Lee, L. K. (2008). Three-axis electronic collision sensor for airborne application. 2008 2nd International Symposium on Systems and Control in Aerospace and Astronautics, ISSCAA 2008. https://doi.org/10.1109/ISSCAA.2008.4776388
Von Bergen, F., Giribet, J., y Martos, P. (2015). Low cost attitude estimation system. Performance evaluation on an airbearing based testbed. 2015 6th Argentine Conference on Embedded Systems, CASE 2015, 25–30. https://doi.org/10.1109/SASE-CASE.2015.7295843
Xu, X., y Huang, D. (2018). UAV Pose Estimation Based on Prior Information and RANSAC Algorithm. 2018 3rd IEEE International Conference on Image, Vision and Computing, ICIVC 2018, 605–608. https://doi.org/10.1109/ICIVC.2018.8492870
Young, G.-S., y Chellappa, R. (1990). 3-D motion estimation using a sequence of noisy stereo images: Models, estimation, and uniqueness results. Pattern Analysis and Machine Intelligence, IEEE Transactions on, 12(8), 735–759. https://doi.org/10.1109/34.57666
Zakharin, F. M., y Ponomarenko, S. А. (2017). Unmanned Aerial Vehicle Integrated Navigation Complex. Electronics and Control Systems, 3(53), 23–26. https://doi.org/10.18372/1990-5548.53.12146
1. Ingeniero Electrónico, Magíster en Ingeniería Electrónica y Doctor en ingeniería. Profesor Titular en la Universidad del Magdalena, Santa Marta, Colombia. jgomez@unimagdalena.edu.co
2. Ingeniero Electrónico, Magíster en Ingeniería Electrónica. Profesor Asociado en la Universidad del Magdalena, Santa Marta, Colombia. rlineror@unimagdalena.edu.co
3. Ingeniero Electrónico, Magistra en Ingeniería Electrónica. Profesora Asociada en la Universidad del Magdalena, Santa Marta, Colombia. ybletrang@unimagdalena.edu.co
[Índice]
revistaespacios.com

Esta obra está bajo una licencia de Creative Commons
Reconocimiento-NoComercial 4.0 Internacional