![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
Vol. 40 (Nº 11) Año 2019. Pág. 7
MÉNDEZ, Erik F. 1; MAFLA, Gabriela M. 2 y REYES, Francisco J. 3
Recibido: 21/11/2018 • Aprobado: 27/03/2019 • Publicado 08/04/2019
RESUMEN: La presente investigación, propone un modelo matemático de un panel solar, basado en un Control Predictivo por Modelo que permitirá utilizar información con un horizonte de predicción, para adelantar las posibles acciones a tomar y asegurar que el panel solar entregue durante su operación, el mayor potencial. La alternativa abordada en este documento es presentada con ejemplos y comparaciones para que de esta manera el lector tenga la capacidad de elegir por sus funcionalidades y prestaciones el tipo de control óptimo. |
ABSTRACT: The present investigation proposes a mathematical model of a solar panel, based on a Predictive Control by Model that will allow to use information with a prediction horizon, to advance the possible actions to be taken and ensure that the solar panel delivers during its operation, the highest potential. The alternative discussed in this document is presented with examples and comparisons so that in this way the reader has the ability to choose the most optimal type of control for their functionalities and features. |

Los países latinoamericanos disponen de variadas características topográficas, con condiciones climáticas únicas que les confieren un elevado potencial para la utilización de energías renovables y limpias. Estas características han permitido agregar a los paneles solares como sistemas de electricidad y energía rural dentro del inventario de los recursos energético-eléctricos de un país. Esto ha provocado la reestructuración de las matrices energéticas de los distintos países inmersos en promover energías renovables como base energética de producción (Arcos, Urbina, & Sotomayor, 2012). El diseño de políticas, estrategias y medidas para incentivar el mayor uso de estas energías limpias, que promuevan el desarrollo especialmente en zonas rurales, se fundamentan en su cuantificación, disponibilidad y distribución estacional en un territorio. Por estas razones es una prioridad asegurar una fuente de energía confiable, segura y accesible (Dousoky & Shoyama, 2012) a través de Sistemas de Energías Renovables. En este sentido, los sistemas fotovoltaicos y su desarrollo en el área de la generación de electricidad han permitido impulsar la construcción de fuentes de energía libre de contaminantes (Dousoky & Shoyama, 2012). Existen numerosas técnicas que buscan garantizar el Seguimiento del Punto de Máxima Potencia (SPMP) para sistemas fotovoltaicos, entre las cuales se pueden citar: el método de perturbación y observación, el método de circuito abierto y cerrado, algoritmo de incremento de la conductividad (Farooqui, 2017) hasta sistemas basados en lógica difusa (Farooqui, 2017). En el presente trabajo, se propone un modelo de simulación del algoritmo basado en un Control Predictivo por Modelo (CPM), que permitirá utilizar información con un horizonte de predicción, para adelantar las posibles acciones a tomar y asegurar que el panel solar entregue durante su operación, el mayor potencial.
El SPMP juega un papel muy importante dentro de la eficiencia del sistema de generación fotovoltaica, al maximizar la salida para un conjunto de condiciones dadas (Farooqui, 2017). Un correcto algoritmo para garantizar el SPMP puede reducir el costo total del sistema. En este sentido, el algoritmo del SPMP busca mantener el mayor rendimiento del sistema de generación en todo momento (Hohm & Ropp, 2003). La mayoría de los fabricantes optan por implementar un modelo de algoritmo basado en el método de “Perturbación y Observación” (P&O) (Hohm & Ropp, 2003), el mismo que en el presente desarrollo, será utilizado para realizar una comparación con respecto al modelo propuesto.
El control predictivo con cierto grado de seguridad busca determinar cuales serán las acciones que ocurrirán en un futuro determinado, a fin de establecer las mejores decisiones de control, tratando, de esta manera, de reproducir el comportamiento humano, en donde seleccionamos una acción esperando el mejor resultado posible (Clarket & Mohtadi, 1987b). La aceptación de esta metodología de control es creciente gracias a la posibilidad de poder involucrar restricciones que posea la planta, sean estas de tipo físico o de seguridad en el proceso. El control predictivo optimiza su funcionamiento de forma interna utilizando una función de costo (Clarket & Mohtadi, 1987a), la misma que se ajusta de forma dinámica. Se pueden citar como componentes de un modelo predictivo los siguientes:
-La ley de control depende del comportamiento predicho.
-Las predicciones de salida son calculadas usando un modelo de proceso.
-La entrada actual se determina optimizando algunas mediciones del comportamiento previsto.
-El horizonte deslizante: la entrada de control se actualiza en cada instante de muestreo
El control predictivo posee varias abreviaturas, las cuales abarcan características propias, pero con un resultado similar; entre las que podemos citar en este trabajo de investigación están: Control de Matriz Dinámica por sus siglas en el inglés (DMC – Dinamic Matrix Control), Control Predictivo General (GPC – Generalised Predictive Control) (Rossiter, 2003).
La mayoría de las leyes de control, por ejemplo, PID no consideran las consecuencias futuras de las acciones de control actuales (Rawlings & Mayne, 2009). Esto se explica por la dinámica esperada del funcionamiento en lazo cerrado. El control MPC, por otro lado, calcula explícitamente el comportamiento previsto para un horizonte. Por lo tanto, se puede establecer una restricción en la elección de las trayectorias de entrada hacia aquellas que no representen futuras dificultades (Hohm & Ropp, 2003).
Para predecir el comportamiento futuro de un proceso, debemos tener un modelo de cómo se comporta el proceso (Rawlings et al., 2012). En particular, este modelo debe mostrar la dependencia de la salida en la variable medida actual y las entradas actuales / futuras. Este modelo no tiene que ser lineal (por ejemplo, función de transferencia, estado-espacio) de hecho, puede ser casi cualquiera. En el control predictivo, el modelo se utiliza únicamente para calcular las predicciones de salida del sistema, por lo que el modelo se ajusta al propósito, proporcionando así predicciones con un rango de precisión alto. El esfuerzo y los detalles puestos en la fase de modelado deberían reflejar esto. Es posible que no sea necesario modelar toda la física, la química y el comportamiento interno del proceso para obtener un modelo que proporcione una predicción confiable, de hecho, no se debe modelar todos estos detalles si no se requiere (Karamanakos et al., 2014). Siempre se recomendará utilizar el modelo más simple con el que se logre realizar el cometido. (Méndez et al., 2017).
Si tomamos como punto de partida para esta definición el ejemplo de la conducción, al recorrer un camino anticipamos cualquier percance estableciendo un horizonte de manejo amplio hacia adelante (Rossiter, 2003). Esto en esencia es el horizonte deslizante, lo cual significa que continuamente se está recogiendo nueva información desde el horizonte lejano y esta información se utiliza para actualizar nuestras acciones de control (decisiones). El control predictivo funciona así: se considera el comportamiento previsto, sobre un horizonte hacia el futuro y, en cada instante de muestreo sucesivo se genera una predicción futura. A medida que se dispone de nueva información, las trayectorias de entrada se ven modificadas automáticamente. Si se busca establecer una dimensión apropiada para este horizonte, se tiene que considerar que, al menos, alcance al tiempo de establecimiento del sistema; de lo contrario, se ignora el comportamiento con una dinámica significativa. Retomando el ejemplo de la conducción, si conducimos a 70 km por hora llevando un control de unos 20 m hacia adelante, las acciones de control que se tomen nunca serán suficientes y el vehículo se saldría de la carretera en la primera curva cerrada.
Si obtiene la función de costo correcta, la estabilidad y el ajuste se verán por sí mismos, ya que por definición está optimizando un costo que solo puede ser pequeño para un buen rendimiento. Cuando se usa un horizonte de control óptimo, MPC siempre dará control estable (al menos para el nominal) por lo que se vuelve importante lograr un equilibrio entre el rendimiento en diferentes bucles, buena sensibilidad y también un equilibrio entre la actividad de entrada y la velocidad de respuesta (Zakariae et al., 2017).
Clásicamente, estos equilibrios se logran mediante matrices de ponderación, es decir, poniendo diferente énfasis en el rendimiento en diferentes ciclos de acuerdo con su importancia. Sin embargo, es dudoso que se puedan construir dichos pesos sistemáticamente desde un punto de vista operativo, en general, se requiere un ajuste en línea hasta que el equilibrio parezca correcto. Una pauta típica para dar un valor inicial razonable para los pesos sería normalizar todas las señales (entrada y salida) de modo que el rango de 0 a 1 sea igualmente importante para cada señal; luego usar pesos unitarios en todos los bucles. Es difícil generalizar más allá de esto porque cada proceso tiene diferentes prioridades que pueden ser demasiado sutiles como para incluirlas en las pautas generales.
Uno de los fuertes de MPC es su capacidad de hacer un manejo de restricciones en línea de una manera sistemática, con la esperanza de retener hasta cierto punto los márgenes de estabilidad y el rendimiento de la ley sin restricciones. El algoritmo lo hace optimizando el rendimiento previsto sujeto a la satisfacción de la restricción (Ren & Zheng, 2015).
Por ejemplo, un piloto de carreras optimiza la velocidad, sujeto a la restricción de que el auto permanezca en la pista. Si optimiza la velocidad sin tener en cuenta explícitamente la restricción, la permanencia en pista estaría en juego. Los detalles de cómo se incorporan las restricciones dependen en gran medida del algoritmo desplegado. MPC toma en cuenta de forma sistemática las restricciones y, por lo tanto, permite un mejor rendimiento.
Se basa en la respuesta de un modelo matemático ante una entrada escalón (Figura 1).
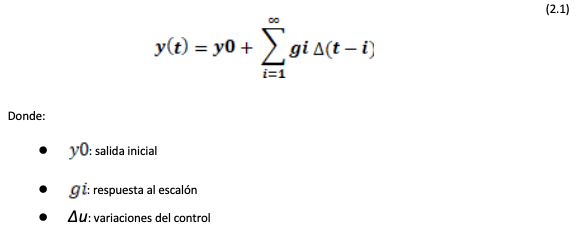
Figura 1
Principios del control DMC
Fuente: Autores, 2019
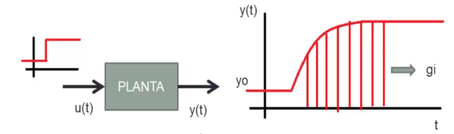
Para poder calcular las predicciones, el sistema debe moverse hacia el futuro k pasos (Figura 2).
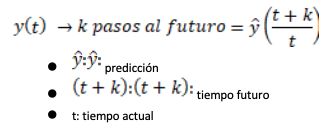
Figura 2
Predicción t+k pasos hacia el futuro
Fuente: Autores, 2019
El modelo de predicción queda establecido como:

En donde M, será el punto donde empieza el estado estacionario para el análisis de los datos pasados (Figura 4).
Figura 4
Inicio del estado estacionario en M
Fuente: Autores, 2019
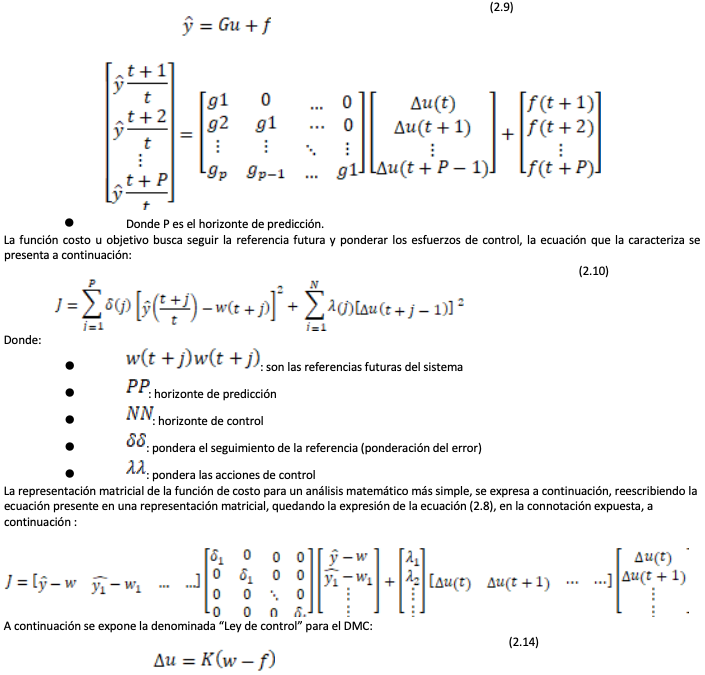
Para la representación matricial del DMC se tomará la ecuación (2.8) y agrupando los términos de respuesta libre y respuesta forzada, se obtiene:
Los resultados de la presente investigación, se obtuvieron mediante pruebas de repetitividad, realizando al final del análisis una comparación con el sistema P&O.
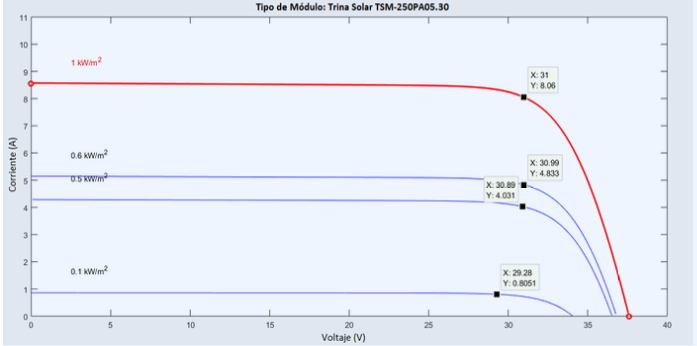
Las curvas en el siguiente panel son obtenidas desde Simulink, al seleccionar un tipo de panel en particular para este caso se usa el tipo TSM-250PA05.30; las curvas corresponden a la simulación de la eficiencia del panel en condiciones a 25 grados centígrados, con irradiancias de 1Kw/m2, de 600w/m2, de 500w/m2 y de 100w/m2, detallando la relación existente entre el voltaje generado y la corriente, haciendo énfasis en el punto establecido en la curva en rojo, que detalla el punto de potencia máxima
Figura 5
Corriente vs Voltaje generado en panel
TSM-250PA05.30 a 25 grados centígrados
Fuente: Autores, 2019
La distribución y detalle de las curvas expresadas en la “Figura 5”, se exponen a continuación:
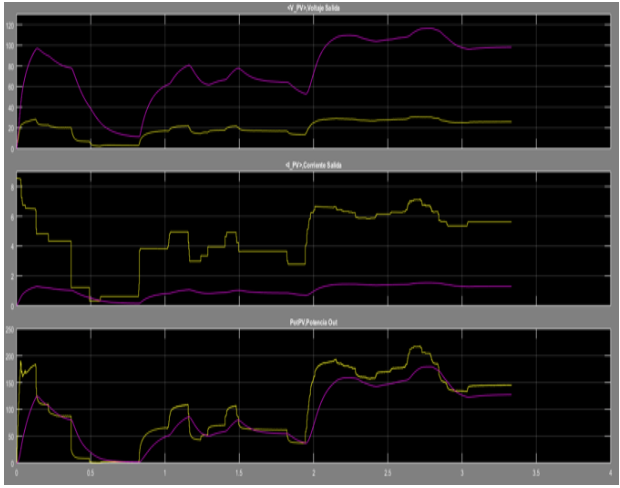
Para la presente prueba se utilizó el control perturbar y observar (P&0), se puede apreciar en el modelo de panel de “simulink”, los resultados expuestos para un seguimiento de los cambios de irradiancia, los cuales se detallan a continuación (Figura 6), es clave el establecer de forma clara que en las imágenes se puede apreciar dos tonos de curvas, el tono amarillo representa los valores que el panel transforma directamente gracias a la irradiancia recibida, el tono morado, es la salida del sistema propuesto, que haciendo uso de un elevador de voltaje y el modelo de control propio de un sistema P&O, trata de mejorar el rendimiento del panel fotovoltaico.
Es así como se ha podido dividir la gráfica de resultados en tres espacios, el recuadro superior, presenta la comparación entre el voltaje de entrada (curva amarilla) propia de las características constructivas del panel frente al voltaje a la salida del elevador (curva morada), estos valores oscilan debido a la simulación de una varianza en la radiación, dicha simulación se logró mediante un control manual dentro del entorno de simulación. El recuadro intermedio, presenta la comparación entre la corriente generada por el panel solar (curva amarilla) frente la corriente que se obtiene una vez se ha hecho uso de la circuitería del elevador (curva morada), mediante las activaciones dadas por el sistema de control propuesto en esta primera fase; y, el recuadro inferior, establece la comparativa entre la potencia generada por el panel (curva amarilla) frente a la potencia generada a la salida del elevador (curva morada) (Ver Figura 6)
Figura 6
Resultados al aplicar el control P&O
Fuente: Autores, 2019
De lo expuesto, y en adición a lo mencionado, el recuadro superior (“Voltaje de Entrada” VS “Voltaje de Salida del Circuito Elevador Simulado”) expone un funcionamiento eficiente del elevador frente a la generación de voltaje, en promedio el panel fotovoltaico genera alrededor de 30v, ante las variaciones de irradiancia. A esto el sistema por medio de una circuitería en simulación para la elevación del valor de voltaje, genera un voltaje de salida, de promedio 90v, teniendo un rendimiento de 3 a 1.
El sistema muestra deficiencias en el recuadro intermedio, de donde se destaca el análisis del comportamiento de la generación de corriente por parte del panel, y la generación de corriente a la salida del elevador, los valores a la salida del elevador (curva morada) están siempre por debajo de la capacidad de generación de corriente propia del panel (curva amarilla).
El recuadro inferior, presenta la existencia de pérdidas de potencia significativas, entre la capacidad de generación del panel y lo obtenido en la elevación del voltaje en la simulación, este comportamiento es propio de un funcionamiento deficiente del sistema de control presentado, destacando que el P&O, si bien es de reducida dificultad de implementación, al momento de analizar su funcionamiento, se puede apreciar una tasa significativa de perdidas, la cual representa una incidencia directa en el estudio de la eficiencia en la generación eléctrica.
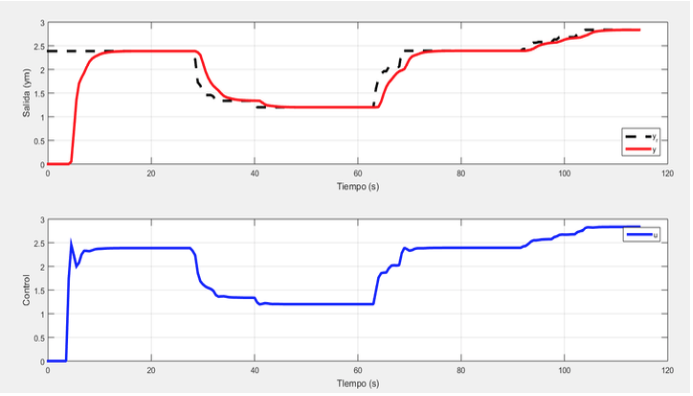
Para la realización de la presente prueba se realiza la construcción del algoritmo propuesto en Matlab, destacando que los datos de la variación de la irradiancia son obtenidos desde Simulink, la curva de tonalidad negra y con la característica de una línea entrecortada, representa la irradiancia presente, la curva continua de tonalidad roja, representa el seguimiento que el control hace en función de los cambios a la irradiancia, estableciendo un horizonte de predicción.
Figura 7
DMC - Curva de seguimiento a la variación de
irradiancia (roja) y acciones de control (azul)
Fuente: Autores, 2019
Se puede observar que la técnica de control predictivo realiza un mejor seguimiento de la irradiancia en el sistema, el control presentado como alternativa P&O, trabaja siempre por debajo de dicha señal. Al aplicar las técnicas con restricciones se debe considerar que algunas de estas restricciones tienen limitantes físicas, la curva en tonalidad azul, presenta las acciones de control a utilizar en el sistema elevador, para la obtención de la máxima potencia posible. La ausencia mayoritaria de picos y cambios bruscos permite inferir que, de ser el caso, esta técnica de control fácilmente podría evitar el desgaste físico de elementos que requieran activaciones que obedecen a cambios repentinos del “set point” establecido.
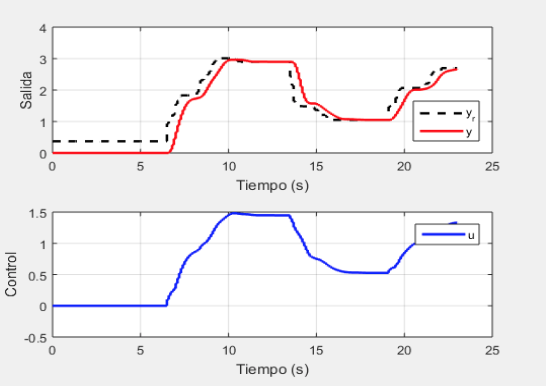
3.3. Prueba utilizando el seguimiento a la variación de irradiancia con un control GPC.
El control GPC es una alternativa en modelos predictivos al DMC, se incrementa una restricción de tipo monotónica para moderar las acciones de control. Los resultados de esta prueba, se pueden apreciar en la figura 8.
Figura 8
GPC - Curva de seguimiento a la variación de
irradiancia (roja) y acciones de control (azul)
Fuente: Autores, 2019
De donde se destaca que:
- “y”, representa el comportamiento (línea negra discontinua) y seguimiento (línea roja continua) variante de la irradiancia en el ambiente
- “u”, representa las acciones de control aplicadas por el algoritmo.
De las gráficas anteriores, se destaca la generación del comportamiento de la irradiancia (línea negra discontinua) y haciendo uso del sistema de control GPC, se puede observar un seguimiento (línea roja continua) bastante similar al control anterior expuesto, siendo este fiable, con una rápida respuesta al cambio repentino, de forma particular, la curva de control (azul), elimina de forma considerable picos observables en su señal, mejorando las estrategias de control, pero no siendo considerable la mejora propuesta, en el seguimiento de la señal de “set point” o irradiancia.
De la presente investigación, se destaca que la importancia de un control óptimo para el seguimiento del MPP, permitirá dar un seguimiento minucioso a los cambios estocásticos presentes en la irradiancia que recibe un panel fotovoltaico.
Adicionalmente, se presenta una técnica de seguimiento de MPP mejorada que utiliza MPC para sistemas fotovoltaicos prediciendo el error en el tiempo siguiente de muestreo antes de aplicar una señal de control, para el propósito la técnica de seguimiento de punto de potencia máxima predictiva se compara con el método P&O comúnmente usado para mostrar una mejora en el rendimiento dinámico y la eficiencia del MPPT. La técnica presenta una convergencia rápida, que es ideal para condiciones ambientales rápidamente variables como el cambio de temperatura o la irradiancia o cambios en la estructura constructiva del panel fotovoltaico.
Como resultado final, se enfatiza que, se captará más energía del sistema fotovoltaico analizado, cuando se disponga de la condición climática de cielo parcialmente nublado, suprimiendo la necesidad de equipos y redes de detección costosos para medir directamente la insolación (radiación) solar cambiante.
Arcos, D., Urbina, M., & Sotomayor, D. (2012). Controlador en Modo Deslizante para Sistemas Fotovoltaicos Conectados a la Red Eléctrica. Maskay, 2(1), 1. https://doi.org/10.24133/maskay.v2i1.141
Clarket, D.W., C. Mohtadi, P. S. T. (1987a). Generalized Predictive Control Algorithm * Part I. The Basic, 23(2).
Clarket, D.W., C. Mohtadi, P. S. T. (1987b). Generalized Predictive Control Part II. Extensions and Interpretations* Part 2, 23(2).
Dousoky, G. M., & Shoyama, M. (2012). Increasing Energy-Efficiency in Solar Radiation Trackers for Photovoltaic Arrays, 4113–4120.
Farooqui, Z. (2017). Study of Maximum Power Point Tracking ( MPPT ) Techniques in a Solar Photovoltaic Array, 2(5), 178–189.
Hohm, D. P., & Ropp, M. E. (2003). Comparative Study of Maximum Power Point Tracking Algorithms, 62(November 2002), 47–62. https://doi.org/10.1002/pip.459
Rawlings, J. B., & Mayne, D. Q. (2009). Model Predictive Control Theory & Design. Madison: Nob Hill Publishing, LLC, 89-120.
Karamanakos, P., Geyer, T., Oikonomou, N., Kieferndorf, F. D., & Manias, S. (2014). Direct model predictive control: A review of strategies that achieve long prediction intervals for power electronics. IEEE Industrial Electronics Magazine, 8(1), 32–43. https://doi.org/10.1109/MIE.2013.2290474
Lastre, A., Méndez, E., & Cordovés, A. (2015). Sistema automatizado para la predicción del flujo de carga en subestaciones eléctricas mediante redes neuronales artificiales. Enfoque UTE, 20-35.
Rawlings, J. B., Mayne, D. Q., Section, O. I., & Offset, Z. (2012). Postface to “Model Predictive Control : Theory and Design” Chapter 1. Getting Started with Model Predictive Control, 43-45.
Ren, H., & Zheng, M. (2015). A Simplified Mixed Logical Dynamic Model and Model Predictive Control of Boost Converter with Current Reference Compensator, 61–65.
Rossiter, J. A. (2003). Model- Based Predictive Control - A practical approach. Boca Raton: CRC Press LLC, 54-64.
SENPLADES. (2013). Plan Nacional Buen Vivir.pdf. Retrieved from www.planificacion.gob.ec%5Cnsemplades@semplades.gob.ec%5Cnwww.buenvivir.gob.ec%5Cnwww.buenvivir.gob.ec
Zakariae, J., Abdelhadi, R., Abdelmounaim, E., & Omar, B. (2017). Toward an approach to improve MPPT efficiency for PV system. 2017 International Conference on Wireless Technologies, Embedded and Intelligent Systems (WITS) (1-5). Fez: Institute of Electrical and Electronics Engineers ( IEEE ).
1. Magíster en Sistemas de Control y Automatización Industrial. Ingeniero Electromecánico. Departamento de Sistemas. Universidad de los Andes, UNIANDES. Ecuador. us.erikmendez@uniandes.edu.ec
2. Ingeniera en Electrónica, Control y Redes Industriales. Estudiante de Maestría en Sistemas de Control y Automatización Industrial. gabriella_1912@hotmail.com
3. Ingeniero en Electrónica y Control Industrial. Departamento de Automatización e Instrumentación. Instituto Superior Tecnológico Intercultural Bilingüe Ab. Martha Bucaram de Roldos. Ecuador. freyes@institutos.gob.ec