![]() ISSN 0798 1015
ISSN 0798 1015

![]() ISSN 0798 1015
ISSN 0798 1015
 Vol. 38 (Nº 20) Año 2017. Pág. 17
Vol. 38 (Nº 20) Año 2017. Pág. 17
Maicon Herverton Lino Ferreira da SILVA 1; Augusto José da Silva RODRIGUES 2; Jorge da Silva CORREIA NETO 3; Guilherme VILAR 4; Robson Fernandes BARBOSA 5; Mônica Ferreira de Brito ROCHA 6; Alandson de Lacerda TAVARES 7; Mayk Bezerra de Albuquerque MELO 8; Felipe Emanoel da SILVA 9
Recibido: 04/01/2017 • Aprobado: 12/01/2017
3. Procedimentos metodológicos
RESUMO: As Plataformas de Stewart (PS) trazem contribuições relevantes para manipulação de ambientes em 3D. Dentre essas contribuições, surgem os Sistemas Hexápodes de Ilizarov (SHI), destinados a corrigirem deformidades ósseas. Assim, com o apoio do framework Scrum, foi realizado o desenvolvimento de um conjunto de quatro objetos de aprendizagem 3D (OA3D), sendo, em seguida, avaliado por oito médicos ortopedistas e onze residentes em ortopedia. Por fim, apresentou-se as contribuições da utilização do framework Scrum da engenharia de software na construção de OA3D e a sua efetividade como mecanismo instrucional na medicina para o ensino-aprendizagem dos SHI. |
ABSTRACT: The Stewart Platforms (SP) bring relevant contributions to handling 3D environments. Among these contributions, the Ilizarov Hexapod Systems (IHS) are developed, aimed at correcting bone deformities. Thus, with the support of the Scrum framework, the development of a set of four 3D learning objects (3DLOs) was carried out, and was then evaluated by eight orthopedic doctors and eleven orthopedic residents. Finally, the contributions of the use of the software engineering Scrum framework in the construction of 3DLOs and its effectiveness as an instructional mechanism in IHS teaching-learning medicine were presented. |

Muitas pesquisas são realizadas a partir da análise reflexiva sobre o comportamento da natureza, buscando aprender com suas estratégias e soluções. Os sistemas que imitam movimentos da natureza, ou seu comportamento, são chamados de biomimetismo (biomimetics). Já os sistemas que se inspiram na natureza para criar outro tipo de mecanismo são chamados de bio-inspiração (bioinspirations) (TORGAL; JALALI, 2011).
Uma aplicação do biomimetismo, por exemplo, é a robótica, que cria um mecanismo de simulação para a caminhada de um inseto hexápode, ou seja, com seis pernas, e que são aplicadas a robôs que exploram lugares de difícil acesso. Um exemplo disso foi apresentado por Chou, Huang e Lin (2012), com um robô bioinspirado em movimentos de uma barata ao escalar degraus, também utilizando os princípios de hexápode.
Partindo da ideia de biomimetizar movimentos da natureza, D. Stewart, introduziu, na década de 1960, um manipulador paralelo com seis graus de liberdade, composto por seis pernas, todas idênticas, que permitem movimentos em seis graus de liberdade (DOS SANTOS, 2010). Esse manipulador, antes usado como atuador hidráulico, mecanismo utilizado na área industrial para robôs que precisavam realizar movimentos de translação, passou a ser utilizado como simulador de voo para treinamento de pilotos. Logo após, com sua popularização, ficou conhecido como Plataforma de Stewart (PS) (Stewart Platform) (STOUGHTON; ARAI, 1993).
Segundo Mello (2011), o uso da PS para os simuladores de voo se expandiu e foi utilizado para construção dos primeiros simuladores baseados na arquitetura hexápode, como pode ser visto na Figura 1.
Figura 1. Primeiro modelo de simulador construído
com arquitetura hexápode

Fonte: Merlet (2006)
Porém, a simulação de voo não foi a única área que utilizou as PS. A área naval, também utiliza simuladores de ponte de comando para treinamento de tripulação, onde são colocados sob uma plataforma com três graus de liberdade e com uma tela de 240° proporcionando aos tripulantes uma maior sensação de realidade.
Ao passo que o uso da PS foi se expandindo, surgiu o interesse na utilização e adaptação de sua metodologia em muitos problemas. A Figura 2 apresenta um exemplo, que é o fixador externo de Ilizarov (FEI), onde demonstra o método criado para alongar membros que, ao receber os princípios da PS, passou a ser não somente um alongador de membros e fixador para recuperação do sistema osteomuscular, mas também passou a ser aplicado na correção do sistema osteomuscular, onde há deformidades no osso, que precisam de correção para melhorar a qualidade de vida dos portadores de anomalias congênitas e de pessoas que sofreram acidentes (EASLEY et al., 2006).
Figura 2. Um fixador externo de Ilizarov
implantado na perna de um paciente

Fonte: Easley et al. (2006)
Essa nova forma que se baseou no FEI é chamada de sistema hexápode de Ilizarov (SHI), onde foram adicionados os mecanismos de plataforma de Stewart, trazendo para a ortopedia um novo método para correção de problemas de malformação óssea, permitindo que os médicos realizem movimentos com seis graus de liberdade a fim de corrigir essas deformidades. É possível observar na Figura 3 um exemplo do SHI.
Figura 3. Sistema Hexápode de Ilizarov montado em um osso
com deformidade, e após a correção da deformidade

Fonte: Litos (2013)
As malformações congênitas e deformidades causadas por acidentes serão o campo de aplicação dos SHI alvo desse trabalho, a seguir melhor explorados.
De acordo com Ramos, Oliveira e Cardoso (2008), os problemas de malformações congênitas são mudanças presentes no crescimento e desenvolvimento de alguns seres humanos, e isso corrobora toda alteração na ordem estrutural, funcional ou metabólica, que resultam em anomalias físicas ou até mentais ao indivíduo.
Essas anomalias, segundo Penchaszadeh (1993), já afetavam cerca de 5% dos nascidos vivos em meados dos anos 1990. Já no Brasil, nos últimos anos as malformações congênitas representam uma das principais causas de mortalidade infantil, sendo cerca 11,2% dos óbitos nessa categoria (RAMOS; OLIVEIRA; CARDOSO, 2008).
Assim, os problemas que afetam o sistema osteomuscular representam, segundo Ramos, Oliveira e Cardoso (2008), cerca de 30% dos casos de malformação. Ainda segundo os autores, na Classificação Internacional de Doenças (CID), 10% possuíam mais de um tipo de malformação congênita e, dentre estas, 58,3% de polidactilia e 16,7% ambos para pé torto e deformidade torácica. Isso mostra que os problemas que afetam o sistema osteomuscular estão presentes nas dismorfologias e que os mesmos precisam de tratamento especializado.
É possível observar na Figura 4 uma perna vista lateralmente, em computação 3D, sem anormalidade e com normalidade, ou seja, um problema de malformação do sistema osteomuscular.
Figura 4. Perna vista lateralmente em computação 3D, sem anormalidade e com normalidade.
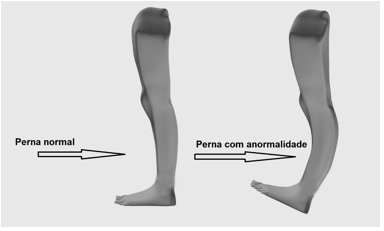
Heverton et al. (2016)
Contudo, esse não é o único problema. Os acidentes graves também geram anomalias no sistema osteomuscular com fraturas que muitas vezes necessitam de procedimentos médicos especializados para corrigir uma deformidade decorrente do acidente e para manipular um aparelho para correção dessas deformidades, como é o caso do sistema hexápode de Ilizarov. Nesses casos é necessário um conhecimento especializado e multidisciplinar que requer um aprendizado sobre sua estrutura matemática, sobre seu funcionamento (com isso surge a oportunidade de se utilizar ferramentas 3D, que são mais intuitivas) e sobre como se dá propriamente o processo de correção.
Durante algum tempo, diversas áreas do conhecimento vem construindo metodologias para auxílio no processo de ensino-aprendizagem. Métodos de ensino e retenção de conhecimento já foram testados e aceitos pela área médica (NETO et al., 2011).
Ainda segundo Neto et al., (2011), embora existam muitos meios para se transmitir o conhecimento, ainda há áreas que precisam ser exploradas a fim de se buscar melhorias para o aprendizado. Um exemplo disso é na medicina, onde apesar de já existirem diversos métodos testados e aceitos, especificamente na ortopedia, no ensino do sistema hexápode de Ilizarov o professor ainda se depara com imensas dificuldades para falar sobre a correção de uma malformação óssea dentro de um espaço tridimensional (3D), principalmente utilizando os seis graus de liberdade possíveis pelo SHI, como afirma o stakeholder desse projeto, o Dr. Epitácio Rolim Filho, médico atuante na área dos SHI e principal disseminador de conhecimento dessa área em Pernambuco.
Visando preencher essa lacuna de ferramental didático, especialmente os que demandem uma visão tridimensional, surgiram os objetos de aprendizagem. Segundo Wiley (2012), objetos de aprendizagem (OA) são tecnologias usadas para o desenvolvimento do aprendizado conforme seu potencial, disponível para reusabilidade, geração, adaptabilidade e escalabilidade.
Além disso, segundo Moran (2000), cada vez mais o conhecimento é processado de forma multimídica, ou seja, juntando pedaços de textos de várias linguagens, superpostas simultaneamente, que compõem um mosaico impressionista, na mesma tela, e que se conectam com outras telas multimídia. Assim, a leitura se torna cada vez menos sequencial e a partir desse processo multimídico, a construção do conhecimento se torna mais “livre”.
Ademais, o aprendizado multimídico contribui para que a utilização dos objetos de aprendizagem multimídia (OAM) se torne, cada vez mais, uma ferramenta de ensino para a construção do conhecimento, e, dessa forma, possa auxiliar o aprendizado na educação médica, neste caso particular, no ensino do sistema hexápode de Ilizarov.
Vale salientar que, atualmente não há uma forma concreta, um roteiro padrão ou um guia de melhores práticas para tornar a criação de OAM estruturada ou até mesmo documentada. O que geralmente ocorre é que surge uma necessidade, é feito um protótipo e, sendo este aprovado, é utilizado. A partir disso utilizou-se um framework da engenharia de software, o Scrum, para acompanhar o processo de desenvolvimento dos OAM, tornando-os claros e objetivos de acordo com a necessidade do instrutor, órgão, empresa ou cliente.
A computação gráfica é uma área da ciência da computação que visa gerar imagens, em geral um modelo, que represente a recriação de um mundo ou situação real. É bastante utilizada para gerar animações e jogos virtuais.
Com o avanço tecnológico diversas técnicas para desenhar modelos em computação gráfica foram desenvolvidas, tais como: modelagem a partir de imagens; modelagem manual e por camadas, em particular, técnicas que possibilitam representar situações reais com modelagem em três dimensões (3D) ou com realidade virtual.
Segundo Silva (2001), “a realidade virtual surgiu como opção de lazer, onde a possibilidade do usuário fazer parte de um mundo diferente do seu tornou-se atrativa”. É por meio da computação gráfica que isso é possível, criando mundos virtuais e objetos de aprendizagem 3D. Partindo disso, muitas áreas do conhecimento, tais como educação, medicina, física, química e arquitetura, dentre outras, passaram a usar a computação gráfica como ferramenta.
Na visão de Dev (1999), um dos principais objetivos da educação médica é o de ensinar a detecção (diagnóstico) e a resolução de problemas, com base em amplos conhecimentos e experiência, bem como a análise de cada doente. Vale ressaltar ainda que, durante o processo de aprendizado, as imagens constituem um elemento essencial da aprendizagem de conteúdos.
Portanto, o processo de aprendizagem carece de recursos tecnológicos que venham a potencializar a captação, aprendizagem e memorização, por meio de sons e imagens. Nesse sentido, os OA apresentam uma particularidade com os objetos de aprendizagem 3D, pois possibilitam a transmissão visual do conhecimento. Assim, é possível nortear o conhecimento com demonstrações visuais e explicações simultâneas às imagens exibidas, conduzidas pelo professor.
A proposta desse trabalho foi inicialmente estimulada pela identificação da necessidade de um médico, da Associação de Assistência à Criança Deficiente (AACD), de trabalhar no ensino do sistema hexápode de Ilizarov a seus médicos residentes. Dada a dificuldade natural de se ensinar algo tridimensional sem um ferramental apropriado, vislumbrou-se a necessidade de se criar objetos de aprendizagem em 3D como elemento do processo de aprendizagem desses médicos, mas também se optou pela utilização de métodos da engenharia de software como base para gerenciar o processo de desenvolvimento dos objetos propostos.
Dessa forma, os objetos foram desenvolvidos como trabalho de dissertação de mestrado, e este artigo visa dar continuidade às pesquisas iniciadas em Silva (2013) e analisar se houve aumento significativo no nível de compreensão no processo de educação médica no contexto dos SHI utilizando OAM3D. Um trabalho semelhante foi publicado por Battistella e Von Wangenheim (2011).
Graças ao crescimento das tecnologias, novas formas para que o conhecimento seja compreendido e captado foram, cada vez mais, ganhando amplitude, se integrando, se conectando e se relacionando com o aprendizado e o raciocínio, fortalecendo assim a ideia de que o processo da informação acontece de várias formas e em diversos universos culturais (MORAN, 2000).
Ainda de acordo com Moran (2000), uma das formas mais habituais para o processo de aprendizagem é o processamento lógico-sequencial, que é expressado pela linguagem falada e escrita onde há a construção do sentido aos poucos, em sequencia de espaço ou tempo dentro de uma codificação definida, no caso, a língua.
Com isso surge a necessidade dos OA, que segundo Wiley (2012), seriam tecnologias escolhidas naquela época para a próxima geração de projeto instrucional, usados para o desenvolvimento do aprendizado conforme seu potencial para reusabilidade, geração, adaptabilidade e escalabilidade. Além disso, os OA foram elementos de um nova maneira de instruir baseados no paradigma da orientação a objetos da ciência da computação, que assim como a orientação a objetos, valoriza a criação de componentes que possam ser reusados em vários contextos (CECHINEL; SÁNCHEZ-ALONSO; GARCÍA-BARRIOCANAL, 2011).
Dentro dessa perspectiva é possível perceber que os OA contribuem significativamente, principalmente por ser uma ferramenta interativa baseada na web, assim ampliando as possibilidades de ensino disseminação do conhecimento.
Além disso, os objetos de aprendizagem geralmente estão disponíveis na Internet, o que os torna acessíveis por um número maior de pessoas, diferentemente dos objetos tradicionais, como fitas de vídeo, projetores ou até mesmo livros, que estão acessíveis apenas em um lugar por vez, e muitos são diferenciados por utilizar OA específicos, mas em diferentes contextos (OLIMPO et al., 2010).
Ainda segundo Wiley (2012), o termo “objetos de aprendizagem” veio do Comitê de Padrões de Tecnologia de Aprendizagem (CPTA) para descrever esses pequenos componentes instrucionais, termo este que foi usado por Wayne em 1994, em um título do grupo de trabalho.
Com o uso dessa abordagem, somada à computação gráfica, pode-se então obter os objetos de aprendizagem 3D (OA3D), ou objetos de aprendizagem multimídia (OAM), que são ferramentas gráficas combinadas e utilizadas como elementos de instrução, aprendizagem e troca de conhecimento, seja entre professores e alunos, seja entre profissionais.
O uso de recursos multimídicos para construção do conhecimento ou utilização em salas de aula com a intenção de facilitar, diversificar e contextualizar a construção do conhecimento vem cada vez mais tomando espaço e contribuindo com sucesso para o uso em projetos instrucionais (COCHRANE, 2005).
No ponto de vista de Moran (2000) e Conceição et al. (2011), a construção desse conhecimento a partir de um processamento multimídico é mais livre, menos sequencial e rígido, com um apelo maior por conexões sensoriais e principalmente pelo apelo visual. Assim, o seu uso se torna viável quando é necessário dar respostas imediatas e ter que se situar rapidamente dentro de um contexto (NAJJAR; DUVAL, 2006). Dessa forma os objetos multimídicos são melhores utilizados para o processamento da informação.
No que concerne ao uso da tecnologia em sala de aula, Conceição et al. (2011), completam afirmando que aprender com a tecnologia é usar essas ferramentas no apoio aos processos de reflexão e de construção do conhecimento (ferramentas cognitivas). Nesse caso, a questão determinante não é a tecnologia em si, mas a forma de encarar essa mesma tecnologia, usando-a, sobretudo, como estratégia cognitiva de aprendizagem, o que muitas vezes proporciona o reuso de OA inteligentes, que através do uso de inteligência artificial podem contribuem com o uso dessa estratégia (DA SILVA; VICARI, 2010).
Então, dentro dessa visão é possível perceber que há interação significativa entre os alunos e os interlocutores utilizando OAM, porque o apelo maior ao sensorial é explorado quando os objetos multimídia são utilizados; assim, usar OAM3D também pode ser uma extensão dos OAM e permitem uma melhor interpretação visual e sensorial do objeto em questão (PIZLO et al., 2010).
Ora, os objetos com uso para construção do conhecimento tornam-se uma ferramenta poderosa para o ensino, embora as formas hipertextuais e lógico-sequencial sejam necessárias, mas provavelmente, afirma Moran (2000) é possível obter maior repercussão se começar a lidar com a informação primeiramente pela forma multimídica e isso é possível inclusive pelo uso da internet, que disponibiliza um grande número de OAM que podem ser reutilizados em diversos contextos (SANTIAGO; RAABE, 2010).
Contudo, os objetos de aprendizagem são de essencial uso em algumas áreas de ensino, muitas dessas áreas inclusive possuem grandes repositórios de objetos e muitos desses objetos são avaliados pela própria comunidade que os utiliza (YEN et al., 2010).
É a partir dessa percepção que surgem os OA aplicados à saúde, devido à necessidade de se obter respostas rápidas na construção do conhecimento, seja para causar um entendimento a priori de um problema para em seguida ser aplicado o processo lógico-sequencial e posteriormente o hipertextual, ou até mesmo para construir uma abordagem mais genérica sobre o conhecimento necessário para entendimento de procedimentos futuros, por exemplo.
Com o avanço dos procedimentos médicos, acompanhado ou até mesmo promovido pelo avanço tecnológico, diversos recursos de ensino para educação médica foram desenvolvidos, como OA3D.
Internacionalmente, muitos repositórios para armazenamento de OA surgiram. Um dos principais e internacionalmente mais conhecidos repositórios é o Recurso Educacional Multimídia de Aprendizagem e Ensino Online, do inglês Multimedia Educational Resource for Learning and Online Teaching (MERLOT) (KYBARTAITE; NOUSIAINEN; MALMIVUO, 2010).
Segundo Cochrane (2007), esse é um método fácil para encontrar objetos de diversas naturezas. Ele ainda cita que “os repositórios geralmente consistem em bases de dados pesquisáveis, online e muitas vezes incluem avaliações dos objetos de aprendizagem em suas coleções. Uma coleção de links úteis para encontrar objeto de aprendizagem está hospedado pela Universidade de Alberta (Academic Advanced Distributed Learning, Co-Lab). O site também fornece uma breve descrição e uma visão geral de cada repositório, dando uma boa comparação de cada um”.
No Brasil, por exemplo, existe o Banco Internacional de Objetos Educacionais (2013), que possui objetos educacionais de ensino de acesso público em vários formatos e para todos os níveis de ensino. Durante a realização deste trabalho havia cerca de vinte mil objetos publicados e cerca de cinco milhões e meio de visitas, de 185 países e cerca de cem objetos na área de saúde na coleção de educação profissional.
Outros projetos também, segundo Windle et al. (2010), contribuem para a construção de objetos de aprendizagem para saúde, como é o caso do projeto criado por Ribeiro (2009), para identificação de dismorfologias utilizando os OA3D. Já outros buscam a reutilização dos OA existentes tornando o custo para produzir um OA3D mais barato que construir do zero, em ferramentas genéricas, como ferramentas para criar objetos 3D, fazer edição de vídeo e etc., embora existam ferramentas que reduzem o custo e tempo de produção com OAM (BATTISTELLA; WANGENHEIM; WANGENHEIM, 2011).
Com os OAM3D desenvolvidos por Silva (2013), em conformidade com as solicitações do médico responsável pelo projeto, seguindo o método SCRUM da engenharia de software adaptado pelo autor, vislumbrou-se a necessidade de verificar se há aumento significante no nível de compreensão de médicos residentes e especialistas em ortopedia na educação dos SHI com e sem a utilização dos OAM3D desenvolvidos.
O processo de avaliação foi realizado com médicos que foram divididos em dois grupos distintos:
Foi feita uma breve explanação sobre os sistemas hexápodes de Ilizarov e, em seguida, o médico responsável pelo projeto, o Dr. Epitácio Rolim Filho, passou os formulários para os médicos residentes em ortopedia (Grupo 1) avaliarem o seu nível de conhecimento sobre os assuntos dos quatro OAM3D. Depois de o médico responsável apresentar os OAM3D desenvolvidos, um mesmo tipo de formulário foi novamente aplicado, para que os residentes novamente avaliassem o seu nível de conhecimento sobre os assuntos dos quatro OAM3D. Nessa etapa os especialistas (Grupo 2) também participaram e avaliaram os OAM3D, utilizando o mesmo tipo de formulário.
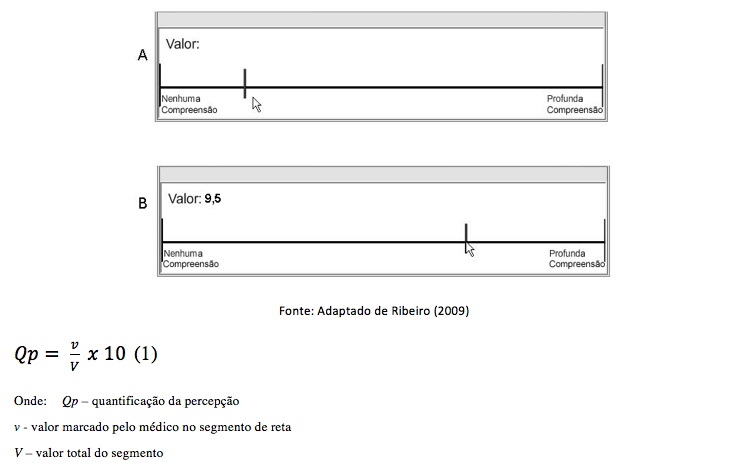
Esses médicos responderam as questões do formulário, por meio do posicionamento qualitativo marcado em um segmento de reta, em uma escala, contendo nas extremidades as indicações “Nenhuma Compreensão” e “Profunda. Compreensão” (JÚNIOR; KNOPFHOZ; MENINI, 2002).
Segundo Ribeiro (2009), por meio do posicionamento de uma resposta qualitativa na escala é possível a atribuição de um valor numérico para essa resposta, possibilitando a quantificação de uma qualidade. Para isso foi utilizado um segmento de reta contendo 14 centímetros de comprimento sem a exibição dos valores, com uma pequena barra que o médico utiliza para marcar o nível de sua compreensão Figura 5 (A e B).
Figura 5. (A) Segmento de reta com uma barra que pode ser riscada em qualquer intervalo
entre “Nenhuma Compreensão” e “Profunda Compreensão” (B), ao riscar no formulário o valor é medido
Em seguida foi aplicado o Test t Student, que é um teste de hipótese usado para testar se existe diferença entre a média de uma amostra (aleatória) e a média populacional, ou seja, se houve diferença significativa entre a média do nível de compreensão antes e depois da aplicação dos objetos de aprendizagem 3D.
Já com relação ao grupo 2 foi realizada uma avaliação na qual os médicos especialistas envolvidos classificaram os objetos de aprendizagem de forma qualitativa, utilizando uma escala variando de “Péssimo” a “Excelente” conforme questionário. A quantificação da percepção foi realizada do mesmo modo que o anterior.
A Tabela 1 relaciona faixas de valores com uma classificação conceitual, possibilitando uma atribuição de classes para os valores obtidos com o processo de quantificação da percepção.
Tabela 1. Distribuição de valores para classificação qualitativa
Intervalo |
Classificação |
0 – 3 |
Péssimo |
3.1 – 4.9 |
Ruim |
5 – 6.9 |
Regular |
7 – 8 |
Bom |
8.1 – 8.9 |
Muito Bom |
9 – 10 |
Excelente |
Fonte: Adaptado de Ribeiro (2009)
Para discutir as considerações finais do trabalho é importante lembrar que não houve a possibilidade de avaliar a dinâmica do Scrum que foi utilizada no trabalho apresentado por Silva (2013), já que a equipe era formada apenas pelo Product Owner, que era o médico especialista que orientou e acompanhou todo o desenvolvimento desde o levantamento de requisitos; como o Scrum Master e o Team eram um só, o autor do trabalho, as reuniões diárias e os artefatos foram reduzidos à adaptação dos roteiros, e cada incremento resultante era uma modelagem 3D para ser utilizada pelo roteiro principal.
Como o Product Owner era o médico especialista e sendo a avaliação dele sobre os OA3D definido pelo mesmo como excelente (10 pontos), é possível perceber que foi útil a instanciação do Scrum do trabalho de Silva (2013), pois atendeu a demanda do principal “cliente” dentro da perspectiva de engenharia de software.
Assim, visando avaliar o nível de compreensão desenvolvido por meio dos OAM3D desenvolvidos, o médico responsável, seguindo orientações gerais do autor deste estudo, procedeu a apresentação dos OA e, em seguida, sua avaliação, com dois grupos de médicos.
No processo de avaliação, tanto para o grupo 1, formado por médicos residentes em ortopedia, como para o grupo 2, formado por médicos especialistas em ortopedia, foram exibidos os quatro objetos de aprendizagem desenvolvidos:
Na aplicação do questionário com o grupo 1 estavam presentes onze médicos ortopedistas.
Assim, para análise dos resultados obtidos antes e depois da aplicação dos objetos de aprendizagem foi levada em consideração a condição de normalidade pelo teste de Shapiro-Wilks, com um nível de significância de 5% (0,05).
Para os resultados obtidos antes e depois da aplicação dos objetos de aprendizagem citados anteriormente e com relação à avaliação do conhecimento sobre sistemas hexápodes, seis graus de liberdade e sobre SHI, foram expressos por médias, valores mínimos, valores máximos e desvios padrões, conforme mostram as tabelas 2, 3 e 4, respectivamente.
Tabela 2. Avaliação do nível de compreensão sobre os sistemas hexápodes
Variáveis |
Média |
Valor Mínimo |
Valor Máximo |
Desvio Padrão |
Antes |
1,29 |
0,71 |
2,50 |
0,57 |
Depois |
1,68 |
0,89 |
2,86 |
0,67 |
Diferença (depois – antes) |
0,38 |
1,79 |
1,96 |
0,10 |
Test t de Student (p < 0,001) |
||||
Para avaliar o efeito da aplicação dos objetos de aprendizagem com relação aos valores obtidos pelos médicos ortopedistas (grupo 1), foi usado o Test t de Student para amostras pareadas, com nível de significância de 5% (α=0,05) (SILVA, 2003). O valor obtido nas três situações foi de p<0,009 mostrando que há diferença estatisticamente significativa entre as médias, e que houve um aumento significativo no nível de compreensão.
Tabela 3. Avaliação do nível de compreensão sobre seis graus de liberdade
Variáveis |
Média |
Valor Mínimo |
Valor Máximo |
Desvio Padrão |
Antes |
0,65 |
0,00 |
2,07 |
0,78 |
Depois |
2,95 |
0,79 |
4,43 |
1,17 |
Diferença (depois – antes) |
2,31 |
0,79 |
3,64 |
0,39 |
Test t de Student (p < 0,001) |
||||
-----
Tabela 4. Avaliação do nível de compreensão sobre SHI
Variáveis |
Média |
Valor Mínimo |
Valor Máximo |
Desvio Padrão |
Antes |
1,58 |
0,93 |
1,07 |
0,54 |
Depois |
2,14 |
1,07 |
4,07 |
0,88 |
Diferença (depois – antes) |
0,56 |
1,64 |
3,00 |
0,34 |
Test t de Student (p < 0,009) |
||||
Igualmente, para os mesmos objetos de aprendizagem foi realizada a avaliação com o grupo 2, o grupo era formado por especialistas em fixadores externos. Por se tratar de um grupo restrito e específico de difícil acesso, esse questionário foi aplicado a oito especialistas. Demonstram-se os dados classificados por cada participante na Tabela 5 por meio da nota atribuída com a marcação do nível de satisfação.
Tabela 5. Avaliação dos OAM3D por médicos especialistas em fixadores externos
Participante |
Valor |
Classificação |
1 |
6,50 |
Bom |
2 |
5,80 |
Regular |
3 |
6,40 |
Regular |
4 |
10,00 |
Excelente |
5 |
5,60 |
Regular |
6 |
7,90 |
Bom |
7 |
8,60 |
Muito Bom |
8 |
5,40 |
Regular |
Média |
7,03 |
Bom |
Embora o trabalho apresentado por Silva (2013) tinha como resultado os artefatos da engenharia de software, que são os OA3D construídos com o apoio da adaptação do Scrum, um dos pontos fracos do trabalho foi que não houve tempo para construção de outros OA3D que atendessem uma demanda maior de médicos, fossem eles especialistas ou residentes, o que fica como sugestão para trabalhos futuros.
Os resultados do Test t Student mostraram que houve um aumento significativo no nível de compreensão dos sistemas hexápodes, seis graus de liberdade e no SHI com p<0,009 conforme também mostrou a pesquisa realizada por Heverton et al. (2016) .
De forma semelhante, a avaliação pelos médicos especialistas possibilitou perceber que as sugestões propostas pelos mesmos devem promover também um maior incremento no nível de compreensão, pois quando uma nota era abaixo da média dos especialistas, sempre houve uma sugestão feita pelo médico especialista que estava sendo avaliado, inserindo sugestões de realizar o procedimento em mais partes do corpo. Além disso, a avaliação geral possibilitou perceber na escala de qualificação que os OA3D foram avaliados, em média, pelos especialistas, como “Bom”, com nota 7,03.
Entretanto, o trabalho com a adaptação do Scrum para construção de OAM3D foi proveitoso, pois trouxe uma aproximação e semelhança com o desenvolvimento de software convencional, o que permitiu observar um provável aumento na qualidade dos OAM3D desenvolvidos.
Com os roteiros, foi possível de forma semelhante ao processo de desenvolvimento de software tradicional, traçar o modelo de desenvolvimento dos OAM3D que a todo instante poderia ser mudado até ser aprovado para que a equipe de desenvolvimento pudesse realmente construir o objeto, ou modelar as partes necessárias que comportariam um OAM3D final.
Porém, uma desvantagem ao utilizar essa adaptação, é que o Scrum por ser uma metodologia de software que se pretende ágil, fez com que a adaptação apresentada herdasse essa característica. Dessa forma, pode ser indicado como trabalhos futuros o aperfeiçoamento da documentação da construção do OAM3D para ir além dos roteiros propostos, gerando mais artefatos de documentação do processo.
Assim, os objetos seguiram um guia para serem construídos, com reuniões e documentação baseada em objetivos para obter os artefatos de OAM3D desejados, porém nem sempre a modelagem ficava o espelho do roteiro, o que demandava atenção do Scrum Master após a entrega das Sprint e dos Produtos de Backlog.
Então, o objeto de aprendizagem que tinha o objetivo de desenvolver o nível de compreensão sobre os sistemas hexápodes de Ilizarov, foi implementado sem muita dificuldade, e o roteiro foi seguido sem muitas alterações, pois se tratava de um objeto 2D, onde a modelagem se dava apenas com a manipulação de vídeo.
Já o OAM3D que pretendia desenvolver o nível de compreensão sobre os seis graus de liberdade, teve seu cronograma alterado, discutido nas reuniões semanais do Scrum, pois a equipe de desenvolvimento na maioria das vezes necessitava de mais tempo do que o que fora estimado para concluir a Sprint ou Produto de Backlog.
Ainda com relação aos OAM3D, era necessário desenvolver também o nível de compreensão sobre o método de Ilizarov (FEI) antigo e o novo (SHI), e, assim como no objeto citado anteriormente, foi necessário rever o cronograma, pois a modelagem 3D demandava tempo além do estimado nas reuniões semanais.
Por último, o OAM3D que visava desenvolver o nível de compreensão sobre a correção de um problema em uma perna, foi desenvolvido da mesma forma dos demais, com a mesma dificuldade de tempo encontrada, porém com a experiência da equipe, a estimativa de tempo para desenvolvimento deste objeto foi medida baseada nos atraso das demais, o que fez com que o prazo para entrega do objeto fosse cumprido.
Portanto, os OAM3D têm influência significativa no aumento do nível de compreensão na educação médica.
Battistella, P. E., & von Wangenheim, A. (2011). Avaliação de Ferramentas de Autoria Gratuitas para produção de Objetos de Aprendizagem no padrão SCORM. Revista Brasileira de Informática na Educação, 19(03), 16.
Battistella, P. E., von Wangenheim, A., & von Wangenheim, C. G. (2011). Evaluation of Free Authoring Tools for Producing SCORM-Conform Learning Objects. IEEE Technology and Engineering Education (ITEE), 5(4), 15-26.
Bioe - Banco Internacional de Objetos Educacionais. (2013). Disponível em: <http://objetoseducacionais2.mec.gov.br/>. Acesso em: 17 ago. 2016.
Cechinel, C., Sánchez-Alonso, S., & García-Barriocanal, E. (2011). Statistical profiles of highly-rated learning objects. Computers & Education, 57(1), 1255-1269.
Chou, Y. C., Yu, W. S., Huang, K. J., & Lin, P. C. (2012). Bio-inspired step-climbing in a hexapod robot. Bioinspiration & Biomimetics, 7(3), 036008.
Cochrane, T. (2005). Interactive QuickTime: Developing and evaluating multimedia learning objects to enhance both face-to-face and distance e-learning environments. Interdisciplinary journal of knowledge and learning objects, 1(1), 33-54.
Cochrane, T. (2007). Developing interactive multimedia learning objects using QuickTime. Computers in Human Behavior, 23(6), 2596-2640.
Da Silva, J. M. C., Vicari, R. M. (2010). Evaluating a Brazilian Metadata to Learning Objects to Web, Mobile and Digital Television Platforms. Federal University of Rio Grande do Sul - Postal Code 15064, Porto Alegre/RS, 91501-970, Brazil, IEEE. Disponível em: <http://www.ieee-tcdl.org/Bulletin/v7n1/papers/silva.pdf>. Acesso em: 10 jul. 2016.
Da Silva, M. H. L. F. (2013). Desenvolvimento de objetos de aprendizagem multimídia com auxílio do Scrum: uma experiência no contexto da ortopedia e das plataformas de Stewart. (Dissertação de Mestrado). Programa de Pós-Graduação em Informática Aplicada, Universidade Federal Rural de Pernambuco, Pernambuco.
De Santiago, R., & Raabe, A. (2010). Architecture for learning objects sharing among learning institutions—LOP2P. IEEE Transactions on Learning Technologies, 3(2), 91-95.
Dev, P. (1999). Imaging and visualization in medical education. IEEE Computer Graphics and Applications, 19(3), 21-31.
Dos Santos, N. F. P. (2010). Modelização de um sistema de simulação de uma aeronave aplicado a uma plataforma electromecânica de Gough-Stewart. (Doctoral dissertation, INSTITUTO SUPERIOR DE ENGENHARIA DE LISBOA).
Easley, M., Looney, C., Wellman, S., & Wilson, J. (2006). Ankle arthrodesis using ring external fixation. Techniques in Foot & Ankle Surgery, 5(3), 150-163.
G. da S. Conceição, H. F. L. Matos, M. de A. Batista; R. W. de S. Costa; R. A. Lima. (2011). A importância de Recursos Multimídia na Aprendizagem Escolar. 63ª Reunião Anual da SBPC. SBPC Jovem, Resumos de Comunicações Livres - ISSN: 2176-1221. UFG, Goiânia – GO.
Heverton, M., Teixeira, M. M., Aquino, C. D., Miranda, L., Freita, W. C., Coelho, A. (2016). Virtual Reality: Manipulating Multimedia Learning Objects. In: International Conference on Web Research. Tehran, Irã. Anais do II ICWR, 2016.
Júnior, E. L., Knopfholz, J., & Menini, C. M. (2002). Estresse durante cursos de suporte avançado de vida em cardiologia. É importante no aprendizado de habilidades? Arq Bras Cardiol, 79(6), 585-8.
Kybartaite, A., Nousiainen, J., & Malmivuo, J. (2010). Learning Objects for the Virtual Campus of Biomedical Engineering. IEEE Technology and Engineering Education (ITEE), 5(1), 9-13.
Litos. (2013), Precision Hexapod - The Optimal Extension for all Ilizarov external fixation systems. Disponível em: <http://litos.com/upload/files/Produkt-PDFs/litos_Praezisions-Hexapod.pdf>. Acesso em: 10 jul. 2016.
Mello, C. B. (2011). Controle de Trajetória de uma Plataforma Stewart para Simulação de transferência de carga Fora de Porto (Doctoral dissertation, Universidade Federal do Rio de Janeiro).
Merlet, J. P. (2006). Parallel robots (Vol. 128). Springer Science & Business Media.
Moran, J. M. (2000). Novas tecnologias e mediação pedagógica. Papirus Editora.
Najjar, J., & Duval, E. (2006). Actual use of learning objects and metadata: an empirical analysis. IEEE Technical Committee on Digital Libraries Bulletin, 2(2), 1-12.
Neto, J. O. R., Cunha, C. S., Rodrigues, N. A., & Tavares, M. (2011). Aprendizagem baseada em problemas: o mito e a realidade. Cad UniFOA, 6(16), 79-84.
Olimpo, G., Bottino, R. M., Earp, J., Ott, M., Pozzi, F., & Tavella, M. (2010). Pedagogical plans as communication oriented objects. Computers & Education, 55(2), 476-488.
Penchaszadeh, V.B. Genética y salud pública. Bol Oficina Sanit Panam 1993; 115:1-11.
Pizlo, Z., Sawada, T., Li, Y., Kropatsch, W. G., & Steinman, R. M. (2010). New approach to the perception of 3D shape based on veridicality, complexity, symmetry and volume. Vision research, 50(1), 1-11.
Ramos, A. P., M., Oliveira, M. N. D., Cardoso, J. P. (2008). Revalência de Malformações Congênitas e Recém-Nascidos em Hospital da Rede Pública. Revista Saúde.Com, 4(1), 27-42.
Ribeiro, B. C. (2009). Identificação de Dismorfologias utilizando Objetos de Aprendizagem. Pontifícia Universidade Católica do Paraná, Pós-Graduação em Ciências da Saúde. Curitiba.
Silva, R. B. V., & Ferreira, D. F. (2003). Alternativas para o teste t com variâncias heterogêneas avaliadas por meio de simulação. ratio, 2(2), 1.
Silva, R. W. A. D. (2001). Educação à Distância em Ambientes de Aprendizagem Matemática Auxiliada pela Realidade Virtual. (Dissertação de Mestrado). Programa de Pós-Graduação em Engenharia de Produção, Universidade Federal de Santa Catarina, Florianópolis.
Stoughton, R. S., & Arai, T. (1993). A modified Stewart platform manipulator with improved dexterity. IEEE Transactions on Robotics and Automation, 9(2), 166-173.
Torgal, F. P., & Jalali, S. (2011). Materiais biomiméticos: materiais de construção inspirados na natureza. Revista Arte & Construção, 240, 38-40.
Wiley, D. A. Connecting learning objects to instructional design theory: A definition, a metaphor, and a taxonomy. (2012). Digital Learning Environments Research Group. Acesso em: 25 ago 2016. Disponível em: <http://wesrac.usc.edu/wired/bldg-7_file/wiley.pdf>.
Windle, R., Wharrad, H., McCormick, D., Laverty, H., & Taylor, M. (2010). Sharing and reuse in OER: experiences gained from open reusable learning objects in health. Journal of Interactive Media in Education, 2010(1).
Yen, N. Y., Shih, T. K., Chao, L. R., & Jin, Q. (2010). Ranking metrics and search guidance for learning object repository. IEEE Transactions on Learning Technologies, 3(3), 250-264.
1. Bacharel em Sistemas de Informação - UFRPE (2011) e Mestre em Informática Aplicada - UFRPE (2013). Atualmente é docente da Faculdade Escritor Osman da Costa Lins - FACOL. Email: maiconherverton[at]yahoo.com.br
2. Graduando do curso de Engenharia de Produção – UFCG.
3. Graduado (2002), mestre (2005) e doutor (2014) em Administração – UFPE. Atualmente é docente da Universidade Federal Rural de Pernambuco – UFRPE.
4. Graduado em Engenharia Elétrica - UFPB (1977), mestre em Engenharia Biomédica – UFPB (1982) e doutor em Génie Biomédicale - UTC (1990) / Rev. Ciência da Computação UFPE. Atualmente é docente da Universidade Federal Rural de Pernambuco – UFRPE.
5. Graduado em Administração – UFCG (2004), mestre em Engenharia de Produção – UFPB (2009) e doutorando em Recursos Naturais - UFCG. Atualmente é docente da Universidade Federal de Campina Grande – UFCG.
6. Graduando do curso de Engenharia de Produção – UFCG.
7. Graduando do curso de Engenharia de Produção – UFCG.
8. Graduando do curso de Engenharia de Biotecnologia e Bioprocessos - UFCG.
9. Graduando do curso de Sistemas de Informação – FACOL.